Case study
ROBINS Project
ROBotics technology for INspection of Ships, aimed at filling technology and regulatory gaps that today still represent a barrier to the adoption of robotics systems in ship inspections
ROBINS (ROBotics technology for INspection of Ships) is a collaborative project co-funded by the European Commission within the Horizon 2020 EU Research and Innovation programme. The project aims at filling the technology and regulatory gaps that today still represent a barrier to the adoption of Robotics and Autonomous Systems (RAS) in activities related to inspection of ships.
CAD and image processing software tools play a key role in the RAS-assisted inspection loop. The software is expected to:
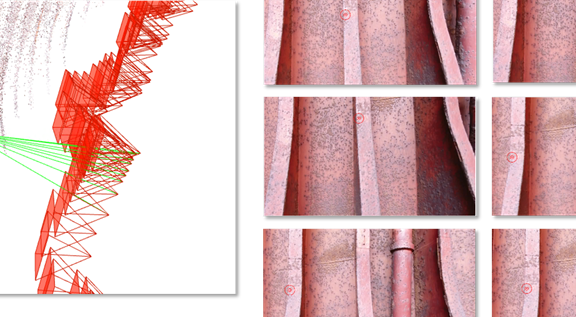
The level of realism in the representation of inspected spaces is expected to be such as to allow the user to feel a satisfactory degree of presence in the virtual space. However, the quality of 3D models and augmented VR models, and hence the quality of the user’s virtual inspection, is strictly related to the quality of visual data taken by the aerial drone and additional data coming from probes and sensors carried by the drone or by the crawler.
Dedicated tools and algorithms for image processing will also be integrated to enhance the possibility of an effective and easy identification of critical or suspect areas in inspected spaces, thus creating a unified environment for virtual inspection.
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 779776
![]()
